
Opto-switch, Opto-coupleur, photo-coupleur je ne sais pas trop comment l’appeler. J’ai découvert il y a peu une référence à ce composant / module: le TCRT5000.
Il s’agit ici d’un composant électronique capable de transmettre un signal d’un circuit électrique à un autre, sans qu’il y ait de contact entre eux. (Merci wikipedia).
Ce tutoriel est une base qui explique comment l’utiliser. Ce composant, nous renverra dans ce cas une valeur. il peut cependant être utilisé dans les robots suiveurs de lignes pour corriger sa trajectoire une fois qu’il franchi la limite de la ligne noire.
Si je me réfère de nouveau a wikipédia, il est composé d’un émetteur, d’un récepteur et d’un “isolant” entre les deux, ici il s’agit d’un simple morceau de plastique. Suivant le surface sur laquelle il est pointé ( réfléchissante ou pas ) , le signal sera émit ou pas de la diode émettrice à la diode réceptrice.
Ce dont vous aurez besoin
Un Arduino Uno – Disponible ici
Un module TCRT5000 – Disponible ici
Quelques câbles de prototypage rapide – Disponible ici
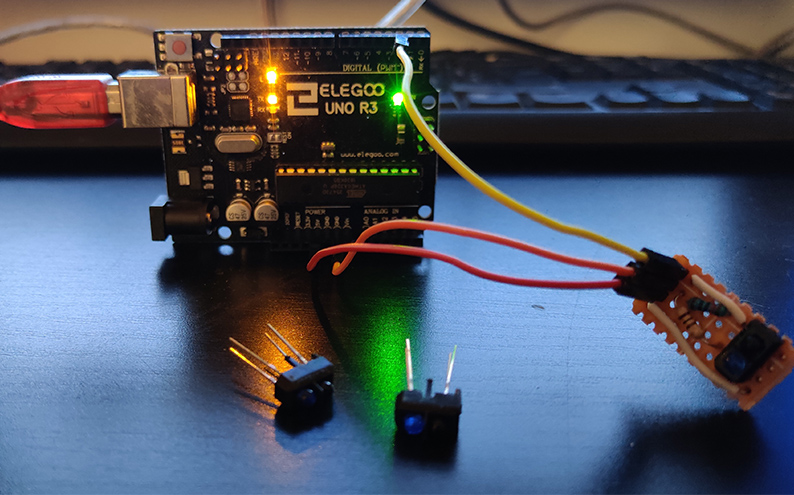
Connexion du capteur infrarouge à l’Arduino
V+ Correspond au +5V de l’Arduino et GND au GND de l’Arduino
Concernant la pin de connexion elle sera placée suivant le code sur la pin D2 ou A0

Concernant les branchements, la pin Arduino peut-être une pin digital comme une pin analogique. Vous obtiendrez sur une pin digital une valeur 1 ou 0 Et sur une pin analogique une valeur comprise entre 0 et 1023.
Je me suis fais un petit montage qui fais 1cm*2cm. simple d’utilisation j’ai suivi le schéma ci-dessus.
Le code
Alors, voiçi le plus simple des codes… y’as rien de plus simple je pense:
Si branché sur la pin digital 2
void setup(){
Serial.begin(9600);
}
void loop() {
int sensorValue = digitalRead(2);
Serial.println(sensorValue);
delay(100);
}Si branché sur la pin A0
void setup() {
Serial.begin(9600);
}
void loop() {
int sensorValue = analogRead(0);
Serial.println(sensorValue);
delay(100);
}
Source: lien






0 commentaires